计算机基本架构-时序逻辑电路回顾
计算机基本架构-时序逻辑电路回顾
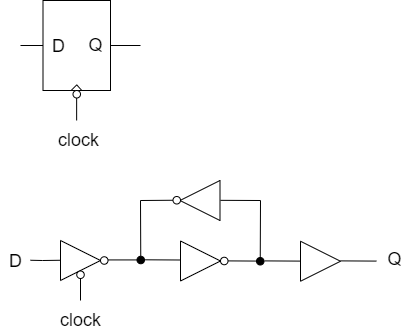
1.D锁存器(D-Latch)
D锁存器(D-Latch)是逻辑设计中最基本的存储元件。它具有数据输入D、时钟输入clock和数据输出Q,如下图所示,它包含一个三态反相器作为输入级,后面连接着两个背靠背的反相器,构成了一个环形连接,用于存储数据。
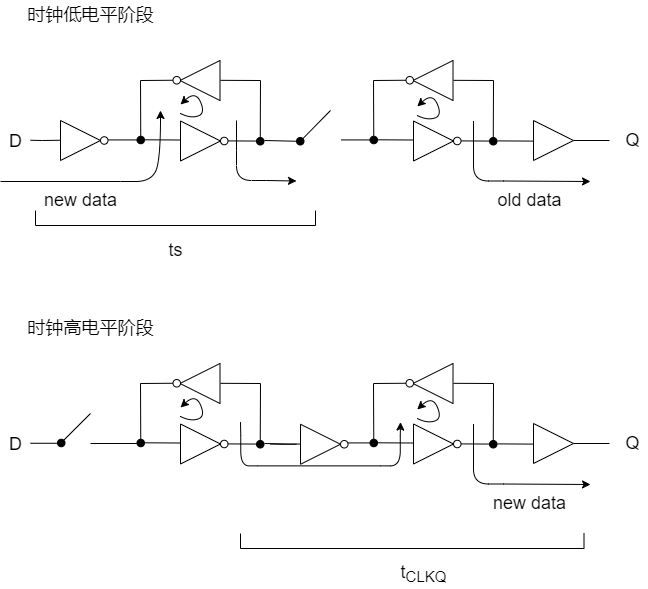
连接到三态反相器使能输入端的时钟信号可以设置为高电平使能或低电平使能。在下图中,输入端的时钟信号为低电平使能。在时钟的低电平期间,输入D可以传递到输出端Q。在时钟的高电平期间,输入的变化被屏蔽,不会传输到输出端。此时数据稳定存储在背靠背的反相器环路中。锁存器的输出级缓冲器用于驱动多个逻辑门输入。
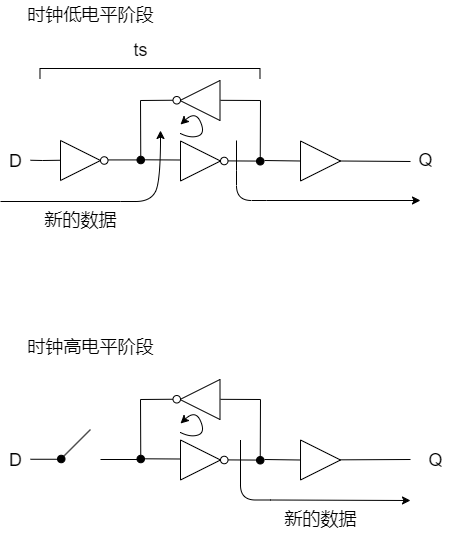
D锁存器的操作过程下图所示。在时钟的低电平期间,三态反相器被使能。新数据通过三态反相器传输,覆盖了背靠背反相器阶段的旧数据,并到达输出。当时钟切换到高电平时,输入输出数据传输停止,因为三态缓冲器被禁用并阻止任何新数据传输。因此,如果需要在锁存器中保留某些数据,需要在时钟上升沿之前的某个时间存储。这个时间间隔称为建立时间,大致等于通过三态反相器和存储元件中反相器的延迟之和。在时钟的高电平阶段,存储在锁存器中的数据不再改变,如下图所示。
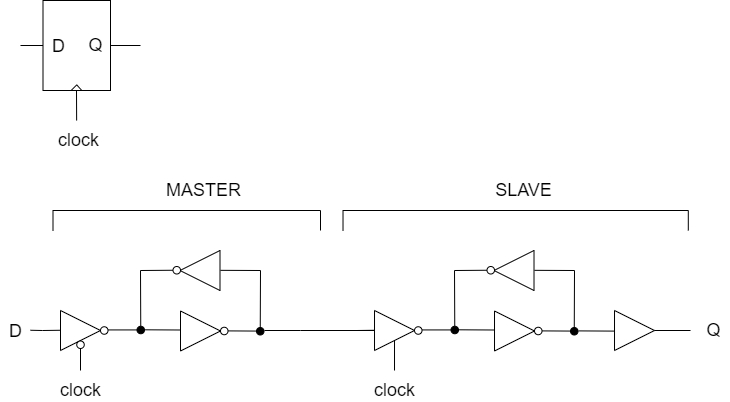
2.D触发器(D-Flip-Flop)
D触发器是逻辑设计中另一个重要元件,可以用于保存数据。和D锁存器类似,D触发器也有一个输入端D,一个时钟输入端clock,一个数据输出端Q。如下图所示。图中展示了一个D触发器的经典电路示意图,其中包含串联的两个锁存器。第一个锁存器具有低电平有效的时钟输入,成为主锁存器(master)。第二个锁存器具有高电平有效的时钟输入,称为从锁存器(slave)。主锁存器在时钟低电平的阶段接收新数据,并在时钟的高电平阶段将这些数据传输给从锁存器。
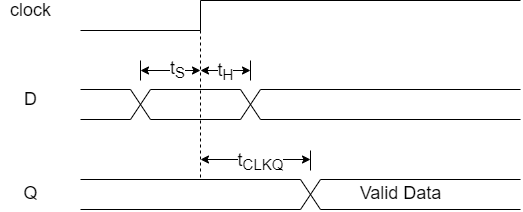
下图显示了触发器的时序特性,建立时间是指有效数据在时钟上升沿之前到达并稳定在主锁存器中的时间间隔。保持时间是指时钟上升沿之后,有效数据需要保持稳定且不变的时间间隔。存储在主锁存器中的数据会在时钟上升沿之后通过从锁存器传播,并在一段时间后成为触发器的输出,这个时间成为时钟到Q的延迟()。
下面这张图显示了D触发器在时钟的两个不同阶段的操作。在时钟的低电平阶段,新的数据进入主锁存器并被存储。数据不能传播到主锁存器之外,因为在时钟的低电平阶段,副锁存器中的三态反相器起到开路作用。此时触发器输出的仅显示存储在从锁存器中的旧数据。当时钟信号变为高电平时,存储在主锁存器中的新数据通过从锁存器传输并到达输出端。可以使用触发器的门延迟来近似估算和的值。
3.时序违规
我们需注意数据路径和时钟网络中的意外延迟可能导致的时序违规。本节将检查由触发器控制的流水线中的建立时间和保持时间违规情况。
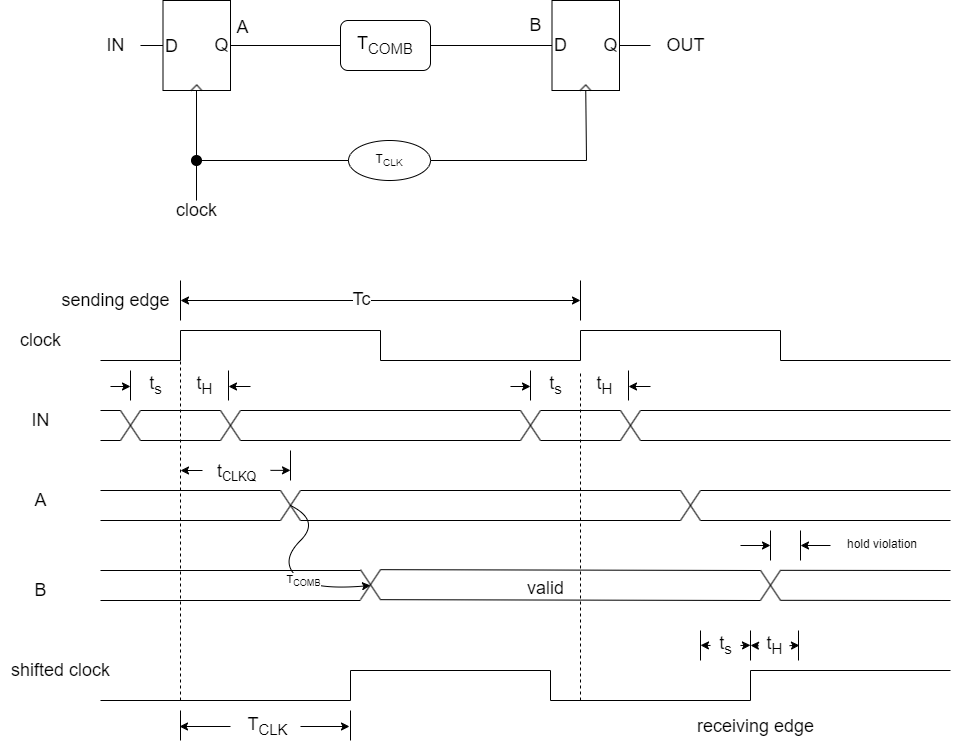
下图展示了一个流水线的一部分,有一个具有传播延迟的组合逻辑块夹在两个触发器边界之间。在时钟的上升沿,有效数据通过IN端口输入,需要满足建立和保持时间的要求。经过的延迟后,数据在A节点处出现,并通过组合逻辑块进行传播,时序图如下所示。

在此图中,数据到达节点B的时间过晚,违反了触发器的分配建立时间。这被称之为建立时间违规。违规的程度取决于时钟周期,可以通过下面的公式进行计算:
保持违规是另一种违规的现象。下面这张图展示了由于时钟线上意外延迟而导致时钟偏移的保持时间违规情况。在时序图中,有效数据从IN端口引入到流水线中,并在经过和延迟后到达节点B。由于时钟偏移,数据提前到达节点B。这造成了一个相当大的建立时间余量,等于(),但在延迟时钟边缘产生了保持时间违规。违规的量取决于时钟延迟,计算如下:
建立时间违规可以通过简单增加时钟周期来修复。然而,修复保持时间违规没有简单的方法,因为它们需要在每个触发器输入处进行搜索。当发现它们时,需要将缓冲延迟添加到组合逻辑块的中,以避免违规。
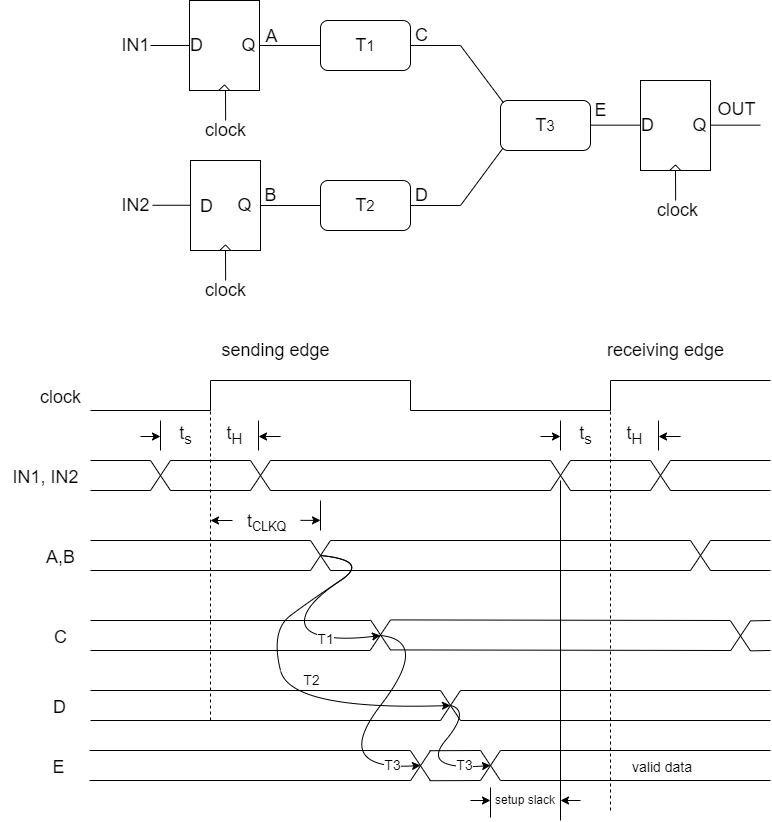
下面这张示意图检查了两个具有不同传播延迟的组合逻辑块在一个流水线合并成一个块的时序影响。在时序图中可以发现,数据抵达C节点比D节点更早。节点C和D的数据通过最后一个组合逻辑块传播并到达节点E。这种情况在节点 E 处产生了最小和最大延迟路径。在考虑建立违规的可能性时,我们需要关注最大路径(T2 + T3);在考虑保持违规的可能性时,我们需要关注最小路径(T1 + T3)在下一个触发器边界处的可能性。
为了进一步说明多个组合逻辑块的时序问题,下图中给出了一个包含逻辑门的示例。在这个示例中,一个一位加法器的输入连接到节点 A 和 B。通过包含一个 2-1 多路复用器(MUX)来旁路加法器,该多路复用器选择加法器的输出或旁路路径。
反相器的传播延迟和二输入 NAND 门的传播延迟分别为 100 ps 和 200 ps。建立时间、保持时间和时钟到 Q 的延迟分别为 100 ps、0 ps 和 300 ps。
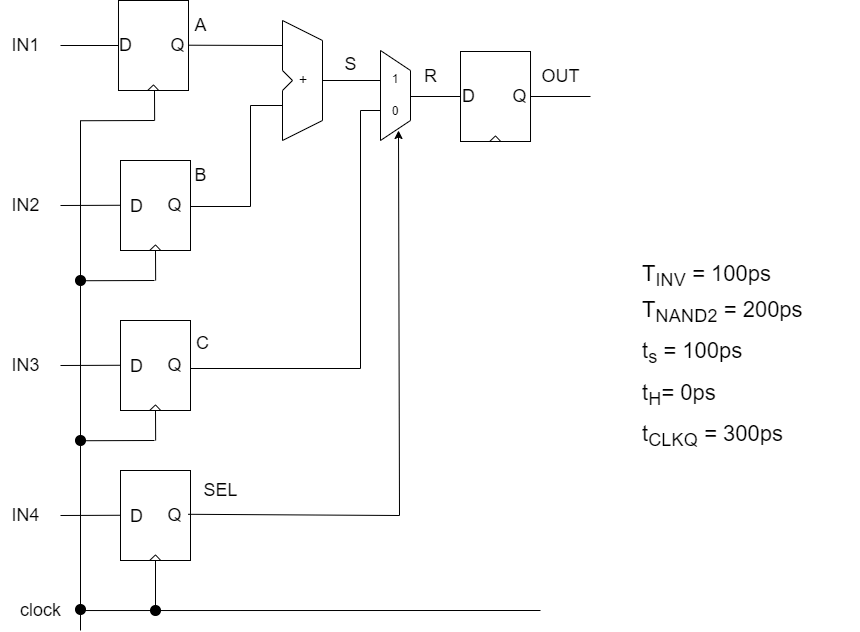
一位加法器和2-1多路复用器由反相器和二输入NAND门构成。我们得到的总共有七条传播路径都汇聚在节点R。然而,我们只需寻找最大和最小延迟路径来确定可能的建立和保持违规。
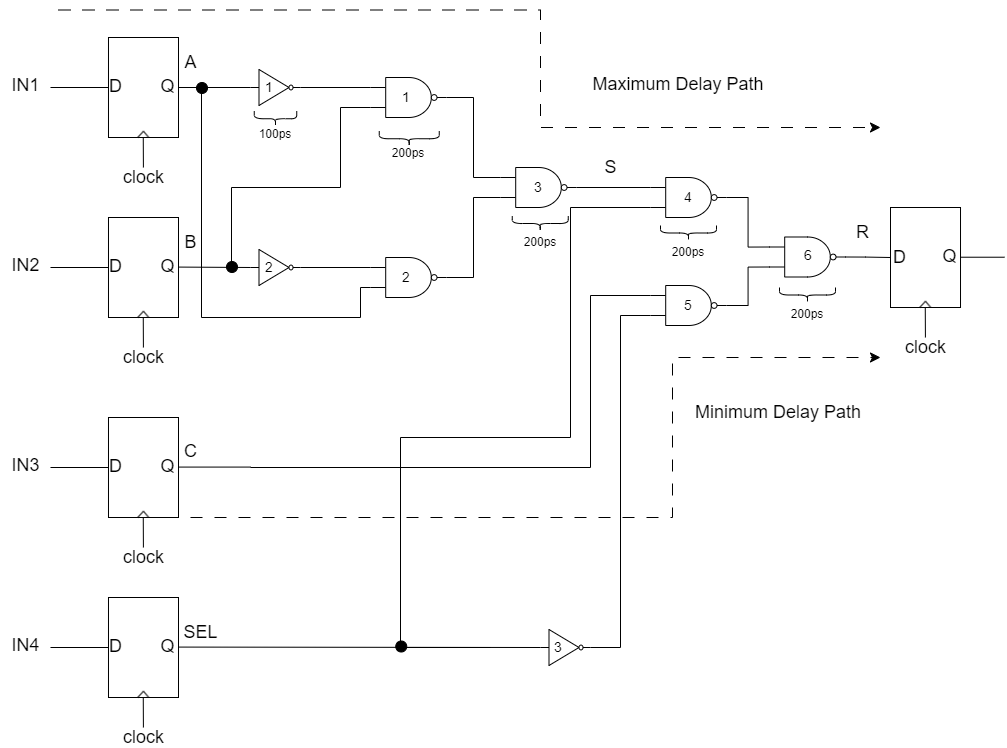
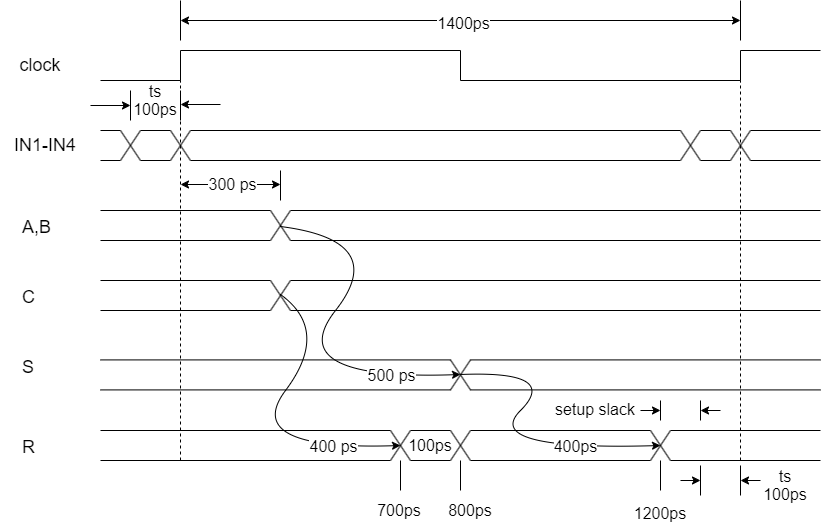
最大延迟路径包括反相器1和四个二输入NAND门,编号为1、3、4和6,如下图所示。该路径总延迟为900 ps。另一方面,最小延迟路径包含编号为5和6的两个二输入NAND门,延迟为400 ps。在时钟周期为1400 ps时,将这些延迟放入下图中的时序图,得出节点R处的建立裕度为100 ps。由于时钟边缘没有偏移,因此不需要检查保持违规。
4.寄存器
前面我们提到的触发器可以用于保存数据,但是其只能在一个时钟周期内保持住数据,当下一个时钟周期到来时,新的数据就会写入进去。
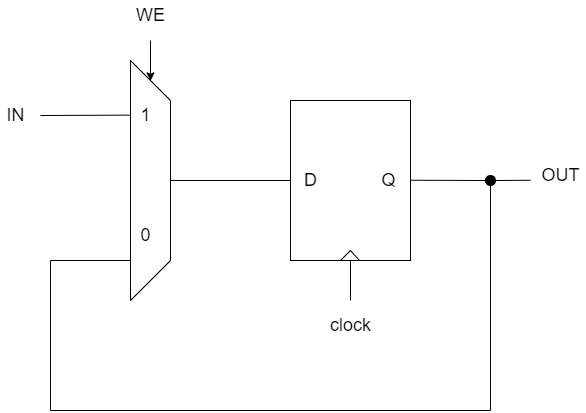
寄存器可以由一个触发器和一个2-1的多路选择器(Mux)构成。写使能引脚(WE)是2-1 Mux的选择输入端。当WE = 1时,将来自IN端口的新数据传输到触发器输入端口。当WE = 0时,任何尝试向寄存器写入新数据的操作都会被屏蔽,寄存器将保持旧值。
下图展示的就是一个单比特的寄存器的电路图。
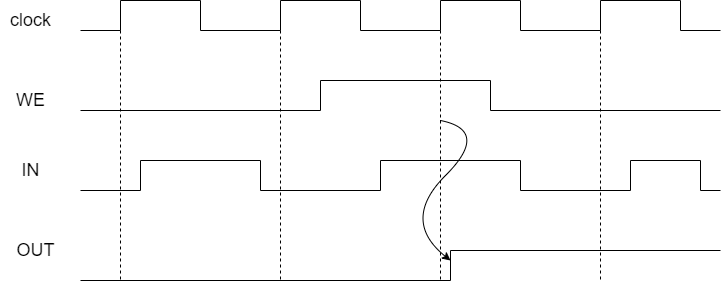
下图展示的是一个寄存器的时序图,描述了一位寄存器的操作。当WE输入为0时, IN端口的输入数据被屏蔽。在第二个时钟周期的中间,当WE输入变为1, 新数据被允许通过 2-1 MUX并在第三个时钟周期开始时更新寄存器的内容。在第三个时钟周期结束之前,WE输入转换为逻辑0,并导致寄存器输出OUT在第四个时钟周期期间保持为逻辑1。
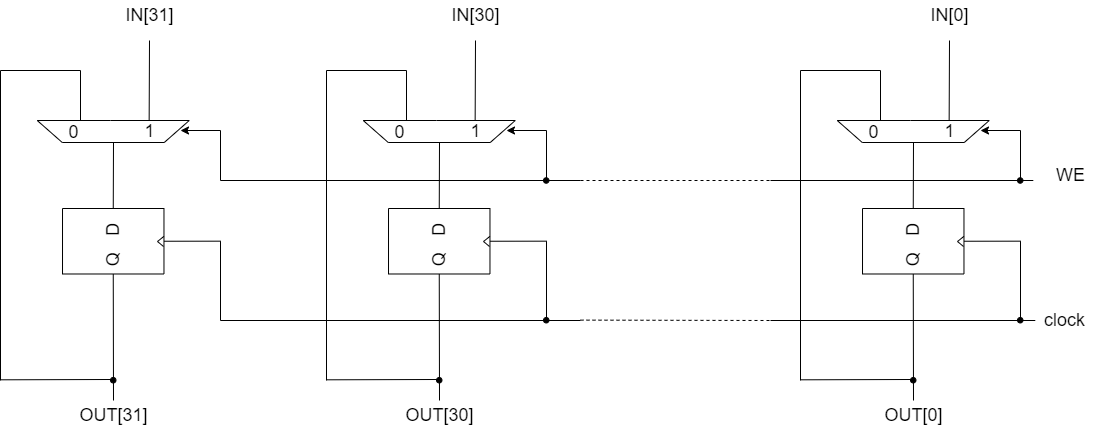
从单比特寄存器推导出更复杂的寄存器是容易的。下图显示的是一个32比特的寄存器。32比特的寄存器拥有公共的时钟(clock)和写使能输入(WE)。因此,如果WE(写使能)输入为逻辑1,那么在时钟上升沿,输入端的32位数据将会被写入寄存器。
5.移位寄存器
移位寄存器是普通寄存器的特定版本,它可以根据设计需求专门用于向右或向左移动数据。
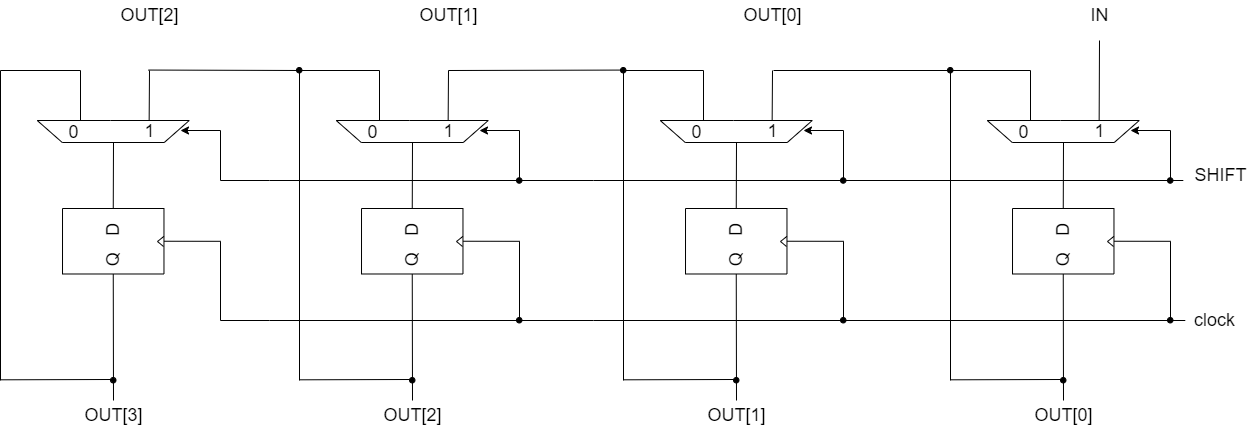
下图显示了一个四位移位寄存器的电路原理图,它在每个时钟上升沿将串行数据从IN端口向左移动。
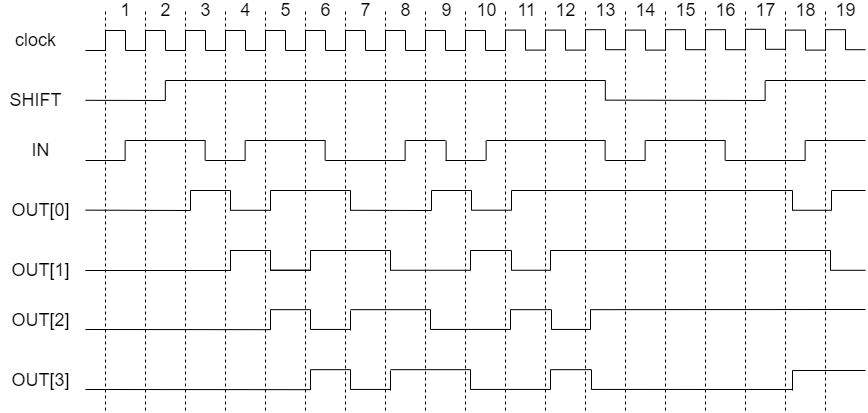
下图是4bit的移位寄存器的时序图,在第一个周期中, SHIFT=0。因此,在这个周期内,IN端的变化不会影响寄存器的输出。SHIFT输入在第二个周期中间转换为逻辑1时,,它允许IN=1在第三个时钟周期时传递到OUT的低位OUT[0]。从第二个周期到第十三个周期,SHIFT保持在逻辑1,因此,在每个时钟的上升沿,IN节点的任何变化都会直接传递到OUT[0]节点。其他输出,例如OUT[1], OUT[2], OUT[3]则会有一个时钟周期的延迟,因为在移位寄存器中,较低位的输出连接到较高位的输入。
6.计数器
计数器是一种特殊形式的寄存器,在设计上会在每个时钟上升沿进行递增(或递减)。
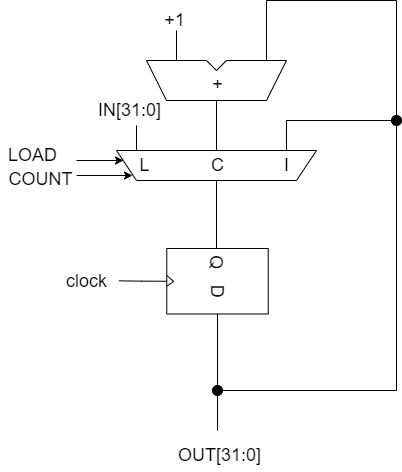
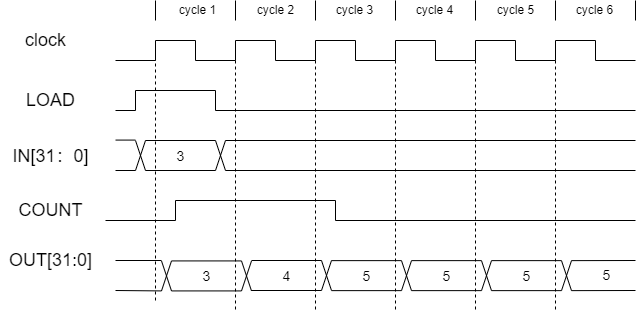
下图是一个典型的32位递增计数器,它有两个控制输入,COUNT和LOAD。当COUNT = 1,LOAD = 0时,选择3-1多路复用器的C端口,使计数器在时钟的上升沿递增计数。而当COUNT = 0,LOAD = 1时,选择L端口,在IN[31:0]端加载新数据。一旦加载完成,计数器输出OUT[31:0]在每个时钟的上升沿递增1,直到所有输出位都变为逻辑1。下一次递增会自动将计数器输出重置为逻辑0。当LOAD = COUNT = 0时,计数器选择3-1多路复用器的I端口。在这种组合下,它既不加载新数据也不递增计数,而是暂停,输出旧的值。
下图是计数器的时序图。在第一个时钟边沿之前,LOAD输入为逻辑1,此刻将会把输入IN中的数字存入计数器之中。因此在第一个时钟的上升沿时,OUT[31:0]=3。此后LOAD=0,COUNT=1,这个状态下计数器将进行向上递增的过程。在第二个时钟上升沿到来时,3+1=4通过3-1MUX的C端口传递并抵达触发器的输入端,使得OUT[31:0] = 4。在三个时钟周期到来时,计数器执行相同的过程,增加1。随后COUNT的值转换为逻辑0,3-1MUX的I端口被激活,此时会阻止任何新的数据写入计数器。因此计数器在随后的几个周期中保持OUT[31:0]=5。
7.摩尔状态机(Moore machine)
状态机主要用于数字设计中以控制数据流的正确性。它们的拓扑结构主要由一个或者多个触发器和连接触发器输出到触发器输入的反馈回路组成。状态机有两种类型: 摩尔型(Moore)和米利型(mearly)。
下图显示了一个由触发器和反馈回路组成的摩尔型状态机的拓扑结构。在这种配置中, 反馈回路包含一个组合逻辑模块,该模块接受触发器输出和外部输入。如果有多个触发器,则所有触发器输出的组合构成状态机的当前状态。所有触发器输入构成状态机的下一个状态,因为在时钟的上升沿,这些输入会成为触发器的输出,并形成当前状态。触发器输出通过一个附加的组合逻辑模块进一步处理,以形成当前状态输出。
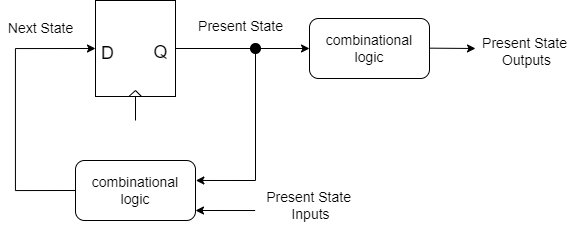
摩尔状态机的状态切换由当前状态和当前状态的输入共同决定,而摩尔状态机的输出完全由当前状态决定,与当前状态输入无关。
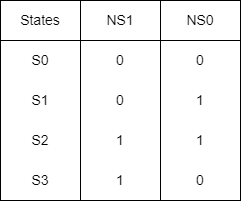
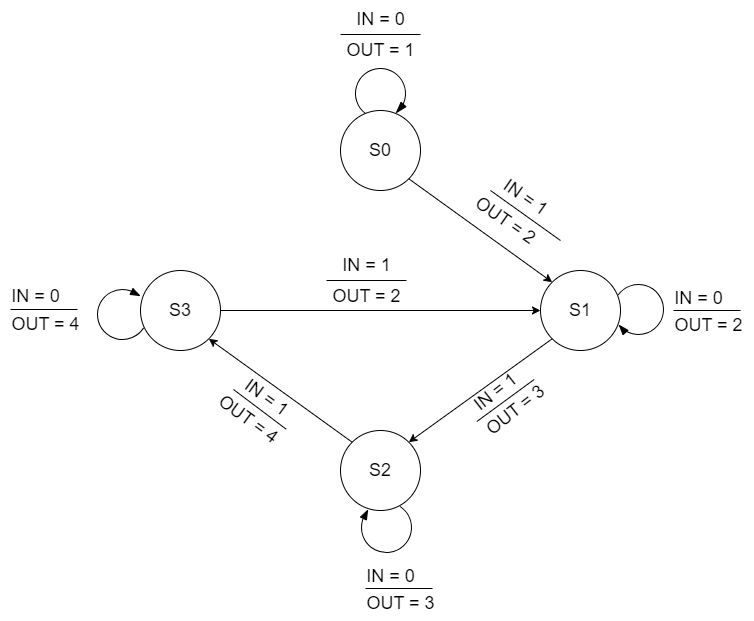
下面的状态图显示了一个具有四个状态的摩尔型状态机的例子。需要注意的是,状态图中的每次状态转换都需要一个有效的当前状态的输入项,并且每个节点都会生成一个当前状态输出。
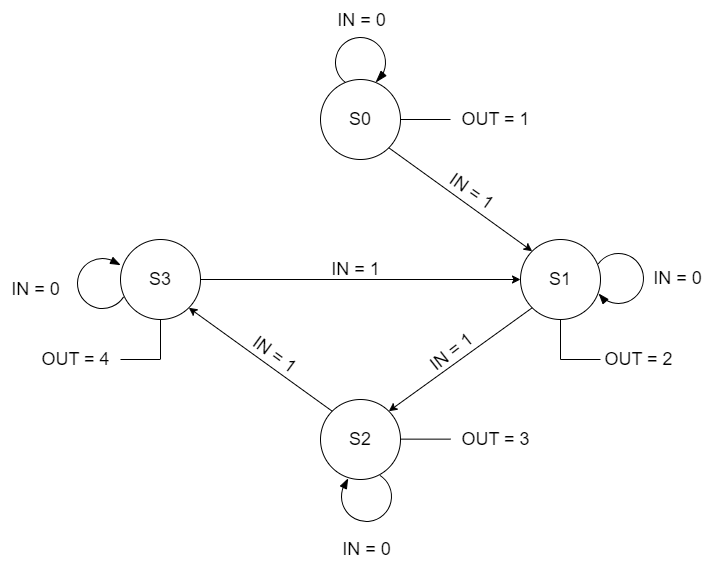
对于状态0(S0),无论当前状态输入IN的值是多少,其输出都为OUT = 1。当IN = 1时,状态S0会转移到下一个状态S1。如果IN = 0,则会保持当前的状态S0。
对于状态1(S1),其输出OUT = 2。如果IN = 0,则保持状态S1,如果IN = 1,则转移到下一状态S2。
对于状态2(S2),其输出OUT = 3,如果IN = 0,则保持状态S2,如果IN = 1,则转移到下一状态S3。
对于状态3(S3),其输出OUT = 4,如果IN = 0,则保持状态S3,如果IN = 1,则转移到下一状态S1。
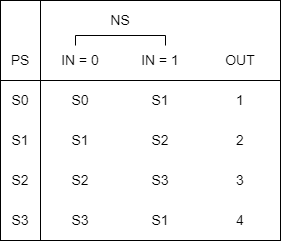
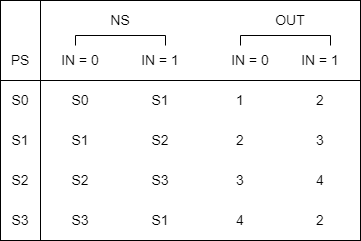
该摩尔状态机的当前状态的输入和输出及其状态可以在下面这样的状态表中列出。在这个表格中,第一列(PS)列出了所有可能的当前状态。中间两列包含了IN = 0和 IN = 1时的下一个状态条目。最后一列列出来当前状态的输出。每个当前状态对应一个输出。
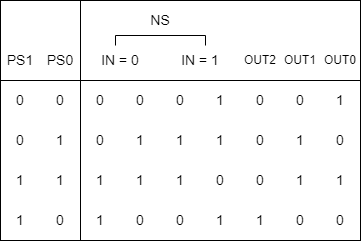
各个状态的二进制编码如下图所示,采用的是格雷码进行编码,两个相邻的状态之间只会有一个比特位改变。
下图中的状态表是根据以二进制编码进行重建后的形式:
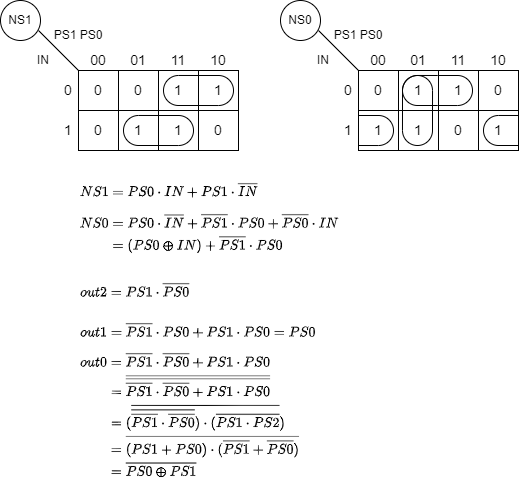
根据上面的转移表,可以画出NS0,NS1,OUT0,OUT1,OUT2的卡诺图,将输入项PS1,PS0和IN进行分组。卡诺图以及对应的最小项(SOP)的形式如下图所示:
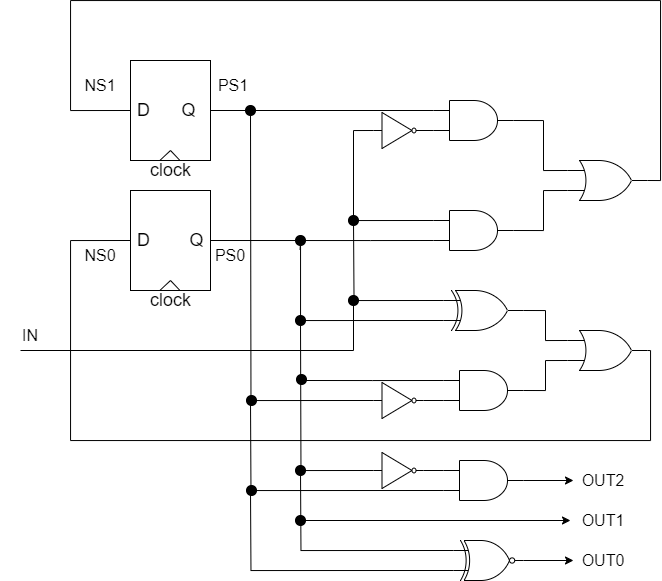
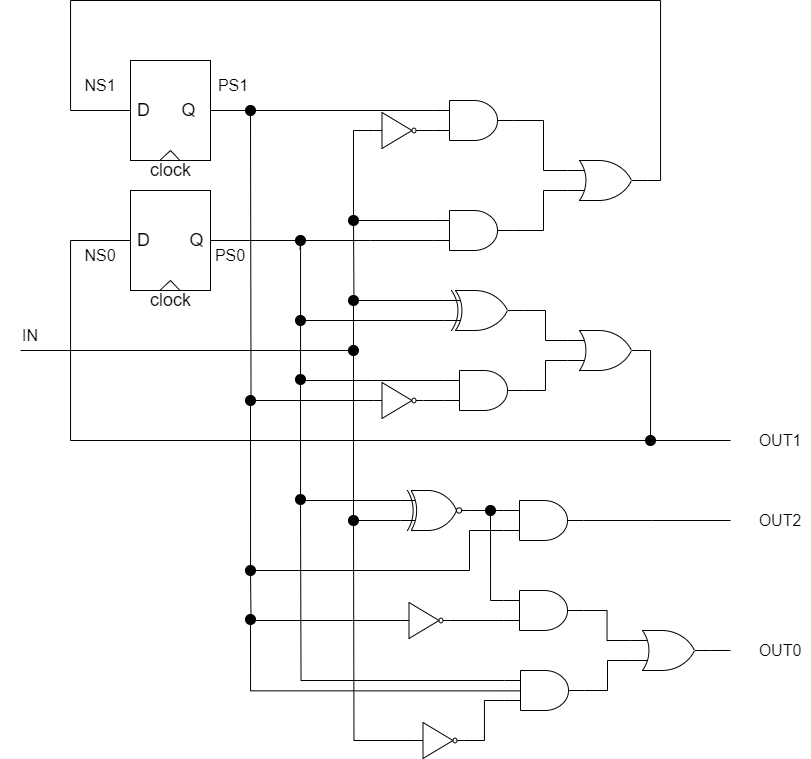
接下来一步是生成电路图,以产生上面的moore状态机中的所有五个输出。电路图如下所示。为了生成这个电路,首先必须根据PS0,PS1和IN构建出NS0和NS1的各个组合逻辑块。然后,将每个NS0和NS1连接到触发器的输入端,以形成反馈回路。OUT0、OUT1和OUT2的逻辑块则直接由PS0和PS1生成。
8.米利状态机
米利状态机和摩尔状态机是类似的,包含一个或者多个触发器组成的反馈回路。不同的是,米利状态机的当前状态的输出是从反馈回路的组合逻辑块生成的,而不是从当前状态生成。
由于这种拓扑结构,米利状态机的基本状态图包括当前状态、下一状态以及使状态转换成为可能的输入条件,如图所示。当前状态输出不是从每个当前状态产生的,而是当前状态输入和当前状态的函数。
贴图
下面这张图是一个典型的米利状态机的状态图,其与摩尔状态机有类似的特征。为了便于比较,两个图中的所有状态名称和状态间的转换保持相同。与摩尔状态机不同的是,连接一个状态到下一个状态的每个箭头都携带当前状态的输出。
米利状态机的状态表包含了两个单独的列,分别列出了IN=0和IN=1时NS和OUT的值。
下图中的状态表是根据以二进制编码进行重建后的形式:
通过米利状态机的转移表,我们可以很容易去构建NS0、NS1、OUT0、OUT1和OUT2的卡诺图形式。最简与或式(SOP)表达式也可以相应的给出。
下面这张电路图是根据最简表达式构建的。构建该电路图的方法与构建摩尔状态机的电路图的方法相同。
9.内存
小型的内存块可以通过各种拓扑类型的单比特寄存器实现。例如下图所示的32位宽、16位深的存储块可以通过将16行32位寄存器逐行堆叠起来构建。每个32位寄存器在其输出端包含三态缓冲器,在读取过程中使用。
在下图中,每列的所有输入端都是相互连接的,以便写入数据。例如输入端口IN[0]连接到从第0行到第15行的所有输入引脚IN[0],从而可以将单个比特的数据写入指定的行。同样的连接方式适用于其余的输入段子,即IN[1]到IN[31]。
同样地,图中每列的所有输出端子也相互连接,以便从存储块读取数据。例如,输出引脚OUT[0]连接到图中从第0行到第15行的所有输出引脚Out[0],从而能够从选定的行读取一个位的数据。其余的输出引脚OUT[1]到OUT[31]也是如此。
图中的每一行存储块通过单独的写使能(WE)和读使能(RE)输入来分别进行数据的写入或读取。
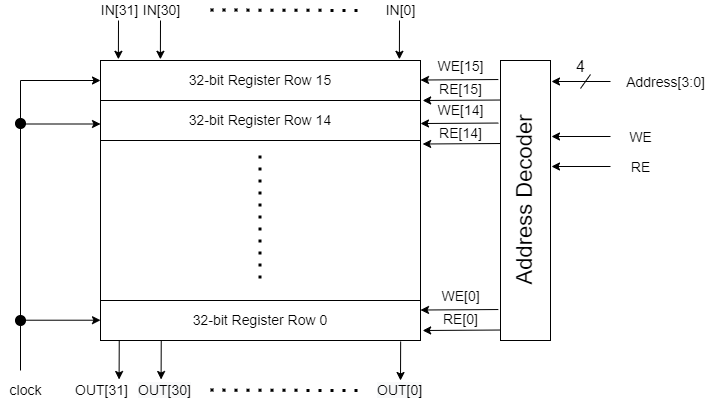
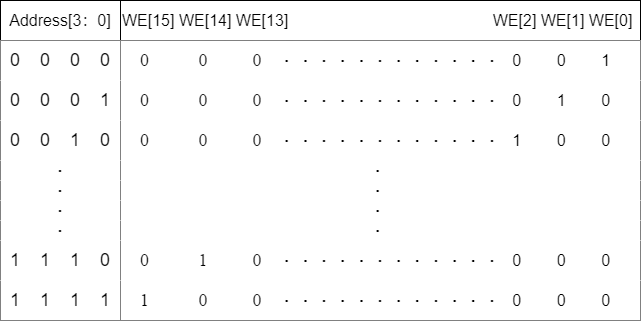
为了生成写使能(WE)输入 ,WE[0]到WE[15], 需要使用一个地址解码器。该解码器使用四位地址Address[3:0]和一个单独的WE输入,根据图中的真值表,每一个地址仅会激活一行并禁用所有其他行。
例如当WE=1且Address[3:0]=0000时,将32位数据写入第0行。
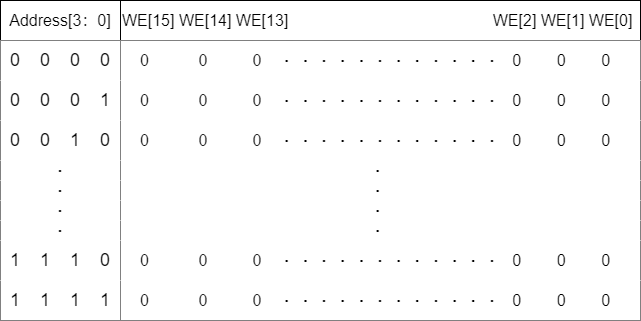
然而,当WE=0时,无论输入地址如何将阻止向存储块的所有行写入数据,如下面的真值表所示。
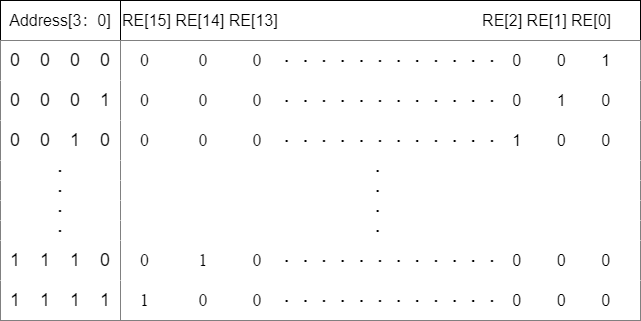
RE输入, RE[0]到RE[15], 使用类似于WE的地址解码器从选定的行中读取数据。当RE=1时,通过下面的真值表,可以将输入地址转化为RE[15:0]的one-hot编码。
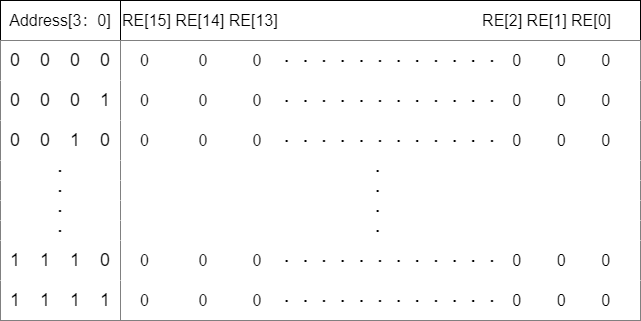
然而,当RE=0时,无论输入地址的值如何,都禁止从任何行读取数据。
因此,必须要提供一个有效的输入地址以及控制信号RE和WE,才能分别执行读或写操作。WE=0, RE=1的组合从选定的行中读取数据, WE=1, RE=0的组合将数据写入选定的行,WE=0, RE=0的组合会禁止对内存块进行读写操作。WE=1, RE=1的组合是不允许的,应将其解释为内存读取。